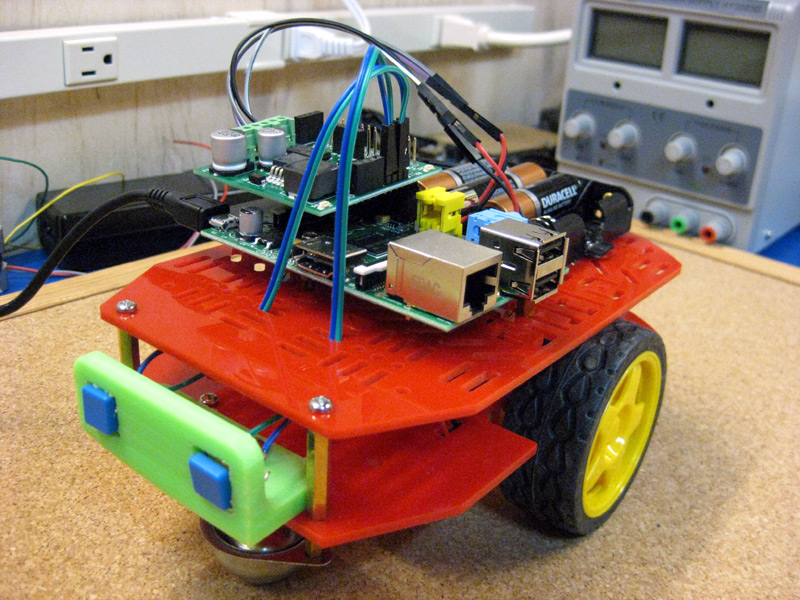
Sean and I have started working on a wheeled robot powered by a Raspberry Pi. Last weekend we finally got it to move! On Sunday we got the RPi mounted, and we also 3D printed a bracket to mount a couple of bump switches to. Currently, the Python code Sean wrote to control it will make it move forward until it bumps into something, then move backwards and turn before starting to move forward again. Pretty simple, but we've got to start somewhere!